
Автоматизированный электропривод полиграфических машин
Публикация предназначена для электромехаников типографий
Целью данной статьи является рассмотрение электропривода в классическом его понимании, характеризующегося достаточно большой мощностью (от единиц до сотен киловатт), используемой, как правило, в печатном и послепечатном оборудовании.

Автоматизированный привод полиграфических машин тесно взаимосвязан с системами управления и контроля технологических параметров, выполняемых на отдельно взятой полиграфической машине или комплексе, и приводит в движение все исполнительные механизмы машины, а также является неотъемлемой частью в системе управления качеством выпускаемой полиграфической продукции.
Электропривод полиграфических машин можно разделить на главный и вспомогательный, однако в настоящее время это разделение весьма условно и станет очевидным по мере рассмотрения развития электроприводов полиграфических машин.
Электроприводы всех типов состоят из двух основных частей, имеющих одинаковое назначение, — исполнительной части и устройства управления. Исполнительная часть электропривода обычно состоит из одного или нескольких электродвигателей и передаточного механизма — устройства для передачи механической энергии двигателя рабочему органу приводимой машины. В нерегулируемых электроприводах чаще всего используют электродвигатели переменного тока, подключаемые к источнику питания либо через контактор или автоматический выключатель, играющий роль защитного устройства, либо при помощи штепсельного разъема (например, в бытовых электроприборах). Частота вращения ротора электродвигателя такого привода, а следовательно, и скорость перемещения связанного с ним рабочего механизма зависит только от нагрузки исполнительного механизма. В мощных нерегулируемых электроприводах применяют асинхронные электродвигатели. Для ограничения пусковых токов между двигателем и источником устанавливают пусковые реакторы или автотрансформаторы, которые после разгона двигателя отключают. В регулируемых электроприводах чаще всего применяют электродвигатели постоянного тока, частоту вращения якорей которых можно плавно (то есть непрерывно) изменять в широком диапазоне при помощи достаточно простых устройств управления. |
Первым в истории развития электроприводом в печатных и послепечатных машинах (ППМ) был привод, построенный на базе асинхронного двигателя с короткозамкнутым ротором (АД к.з.р.) без регулирования скорости. Для изменения скорости приводимых в движение механизмов машины использовались переключаемые редукторы или механические вариаторы. Управление такими электроприводами осуществлялось посредством релейно-контактных схем управления (РКСУ), которые обеспечивали команды «Пуск», «Стоп», защиту цепей от токов короткого замыкания (плавкие предохранители) и длительной перегрузки двигателей с небольшим превышением (тепловые реле).
В качестве примера на рис. 1 приведена схема управления АД к.з.р. с двух постов.
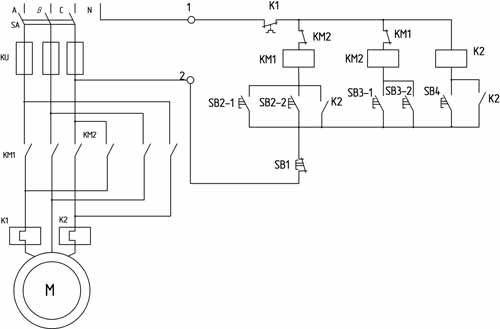
Рис. 1. Схема управления АД к.з.р. Режимы: толчок вперед (SB2-1,2), толчок назад (SB3-1,2), длительный режим работы (SB4); SB1 — кнопка «Стоп»; FU — плавкие предохранители; K1 — тепловое реле; KM1, KM2 — магнитные пускатели; SB1…SB4 — кнопки управления
Как правило, в стоповую цепь управления вводились контакты различных технологических блокировок: неподачи, двойного листа в первую печатную секцию листовых печатных машин (ЛПМ), обрыва бумажного полотна в рулонных печатных машинах (РПМ), неподачи или подачи двойной тетради в подборочных машинах, ограждений опасных зон и т.д. Дальнейшим развитием таких электроприводов стало использование многообмоточных АД к.з.р., что позволяло осуществлять ступенчатое регулирование скорости за счет переключения обмоток статора и изменения таким образом числа пар полюсов вращающегося магнитного поля статора, поскольку частота вращения магнитного поля статора:
n0 = 60f/p,
где f — частота питающего напряжения, p — число пар полюсов, а частота вращения ротора:
n = n0(1-S),
где S — скольжение АД к.з.р.
В некоторых ППМ ступенчатое регулирование скорости главного привода осуществлялось на базе электропривода с трехфазным асинхронным двигателем с фазным ротором. В качестве примера на рис. 2а приведена схема управления главным двигателем, обеспечивающая разгон по реостатной характеристике и работу на скорости, заранее установленной оператором с помощью переключателя скорости SA. Траектория перемещения рабочей точки приведена на рис. 2б.
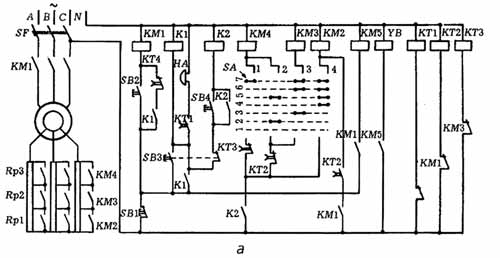
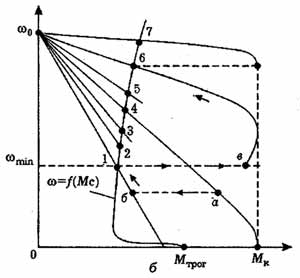
Рис. 2. Схема управления АД с.ф.р.: а — принципиальная схема; б — механические характеристики
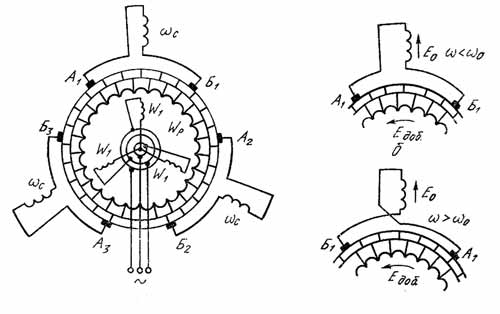
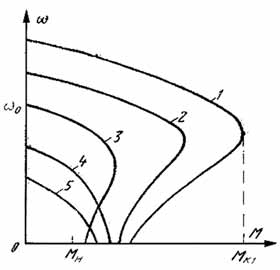
Рис. 3. Принципиальная схема двигателя Шраге (а) и механические характеристики (б)
Первым электроприводом ППМ с плавным регулированием скорости стал электропривод на базе трехфазных коллекторных электродвигателей переменного тока (двигатель Шраге), принципиальная схема которого приведена на рис. 3а, а механические характеристики — на рис. 3б. Особенностью такого двигателя являлось то, что на роторе располагались две обмотки: W1 — трехфазная, аналогичная обмотке ротора АД, питающаяся от сети переменного тока, и Wp — обмотка, аналогичная обмотке якоря двигателя постоянного тока, подсоединенная к коллектору. На статоре расположена обмотка Wс, подключенная к щеткам А и В.
Плавное регулирование скорости осуществляется за счет перемещения щеток А и В (в противоположенных направлениях) специальным серводвигателем. Достоинствами таких двигателей являются достаточно широкий диапазон регулирования скорости (Д ≤ 15) и простота управления. К недостаткам можно отнести большие габариты, вес и сложность конструкции самого двигателя по сравнению с ДПТ той же мощности, а также сложность создания замкнутой системы стабилизации скорости двигателя.

Рис. 4. Функциональная схема электропривода по системе МУ-ДПТ: ЗС — задатчик скорости; КЗ — корректирующее звено; ППУ — полупроводниковый усилитель; П — магнитный усилитель (преобразователь); ДП — датчик тока; ДС — датчик скорости; Д — двигатель постоянного тока (ДПТ); ОВД — обмотка возбуждения (независимая) ДПТ (обозначение элементов схемы соответствует ГОСТам, действующим на момент разработки схемы)
Этапным в развитии регулируемого электропривода постоянного тока с системой стабилизации скорости явилась разработка и внедрение (МПИ, 70-е годы ХХ столетия) электропривода по системе МУ-ДПТ (магнитные усилители — двигатель постоянного тока). В качестве примера на рис. 4 приведена функциональная схема главного электропривода листовой ротационной печатной машины (ЛРПМ). Разработанный и внедренный в отечественных полиграфических машинах электропривод обеспечивал все современные требования, предъявляемые к ним, а именно: широкий диапазон регулирования скорости (Д ≤ 20), точность поддержания скорости (во всем диапазоне регулирования скорости) — δ = ±5%, плавный разгон (во всех режимах работы машины), защиту двигателя от перегрузки, поддержание заданной скорости при действии основных возмущающих воздействий (изменение нагрузки, колебания напряжения сети), реверсирование направления вращения.

Рис. 5. Функциональная схема главного электропривода РПМ: R1 — потенциометр задания толчковой и заправочной скоростей; РС и РТ — регуляторы скорости и тока; БП — вспомогательный источник питания; КМ2, RT — цель динамического торможения
С появлением и развитием силовой полупроводниковой электроники, а именно — мощных и высоковольтных тиристоров (трехэлектродных и оптронных) — в качестве электроприводов полиграфических машин стали использоваться системы ТП-ДПТ (тиристорный преобразователь — двигатель постоянного тока с независимой обмоткой возбуждения). Сначала это были одноконтурные системы с обратной связью по скорости и напряжению якоря, а затем и системы подчиненного регулирования основных выходных координат — скорости и тока двигателя. Такие системы достаточно длительное время были доминирующими в полиграфическом оборудовании и по сей день успешно эксплуатируются. В качестве примера на рис. 5 приведена функциональная схема главного электропривода рулонной печатной машины. Это аналоговая система электропривода подчиненного регулирования, обеспечивающая широкий диапазон регулирования скорости (Д ≤ 100) и высокую точность поддержания скорости (δ = ±0,5%). Дальнейшим развитием электроприводов постоянного тока подчиненного регулирования стало использование бесконтактных двигателей постоянного тока (БДПТ), цифроаналоговых (ЦАСУ) и цифровых систем управления (ЦСУ). Использование в электроприводах полиграфических машин БДПТ, ЦАСУ и ЦСУ позволило расширить диапазон регулирования скорости и повысить точность поддержания заданной скорости (Д > 100, δ = ±0,01%), что, конечно, в полной мере удовлетворяет предъявляемым к ним требованиям. Кроме того, надежность БДПТ гораздо выше ДПТ.
Примеры функциональных схем систем подчиненного регулирования с использованием ЦАСУ, ЦСУ и БДПТ приведены на рис. 6а, б и в соответственно.

a

b

в
Рис. 6. Функциональная схема цифроаналоговой (а) и цифровой (б) САУ ЭП, а также электропривод на базе БДПТ (в): БЗС — блок задания скорости; ЦЗИ — цифровой задатчик интенсивности разгона; ЦАП — цифроаналоговый преобразователь; КГ — кварцевый генератор эталонной частоты; ЦИ — цифровой интегратор, РС и РТ — регуляторы скорости и тока двигателя; ИДС — импульсный датчик скорости; ТП — тиристорный (транзисторный) преобразователь; УДЧ — управляемый делитель частоты; Р1, Р2, Р3 — регисторы памяти; СУ1, СУ2, СУ3 — сумматоры; РС, РСд — регуляторы скорости двигателя; БП — блок преобразователя (транзисторный — IGBT-транзисторы); ФУ — функциональный преобразователь — усилитель; ФП1, ФП2 — функциональные преобразователи; HWI — импульсный датчик скорости; ПМ — печатная машина
Известно, что трехфазный асинхронный двигатель с короткозамкнутым ротором (АД к.з.р.) имеет существенные преимущества по сравнению с двигателями постоянного тока (ДПТ): масса и габариты ротора, а также двигателя в целом гораздо меньше ДПТ; выше эксплуатационная надежность, так как отсутствует щеточно-коллекторный узел; выше динамические показатели. Поэтому создание электропривода с плавным регулированием скорости на базе АД к.з.р. было актуальной задачей, для решения которой необходим надежный экономичный преобразователь частоты. Реализация этой задачи стала возможна только с появлением на рынке силовых высоковольтных полупроводниковых приборов — IGBT-транзисторов (около 1980 года). Сразу после появления IGBT-транзисторов и силовых модулей на их основе началось бурное развитие преобразователей частоты, рассчитанных на широкий диапазон мощностей двигателей — от долей киловатта до сотен киловатт (рис. 7). Использование микропроцессорной техники и цифровых систем управления позволило создать комплектные устройства электроприводов переменного тока с АД к.з.р. и преобразователями частоты с широким диапазоном регулирования скорости (Д ≤ 5·103) с точностью поддержания заданной скорости (δ ≤ ±10–3% ) и с сохранением постоянства вращающего момента во всем диапазоне регулирования скорости.
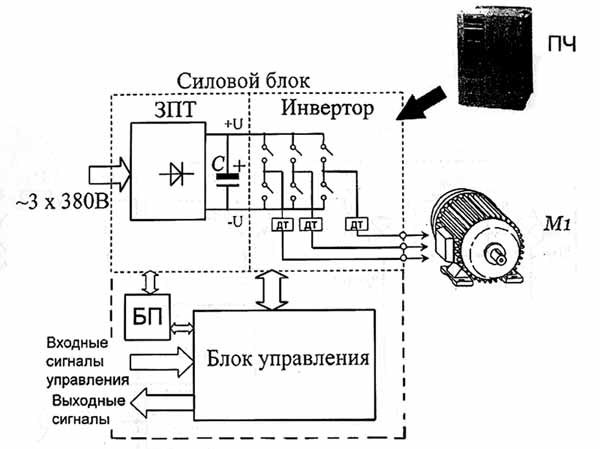
Рис. 7. Структурная схема ПЧ: ЗПТ — звено постоянного тока (неуправляемый выпрямитель); ДТ — датчик тока статора АД к.з.р.; БП — блок питания; М1 — асинхронный двигатель с короткозамкнутым ротором; ПЧ — преобразователь частоты
Наиболее высокие требования, предъявляемые к электроприводам полиграфических машин, присущи печатным машинам. В особенности это относится к рулонным печатным машинам (РПМ). Протяженность многосекционных РПМ большого формата с устройствами сушки и фальцаппаратами, работающих на скорости 60 тыс. об./ч и более (или 10 м/с и более при двойном диаметре печатных цилиндров), достигает 50 м. В таких машинах возникают огромные вибрационные нагрузки на все элементы привода. Это требует специальных мер для устранения подобных возмущающих воздействий, влияющих на качество приводки и самого процесса печати. Одним из решений, ликвидирующих эти проблемы, является использование многодвигательных синхронизированных электроприводов отдельных узлов машины, что позволяет отказаться от всех систем механических передач и связей между ними. Такое решение возможно только с использованием электроприводов переменного тока с преобразователем частоты и АД к.з.р., построенного по замкнутой многоконтурной системе подчиненного регулирования с обратными связями по скорости и углу поворота вала исполнительного механизма (рис. 8).

Рис. 8. Структурная схема многодвигательного электропривода РПМ: DSC-MAR — цифровой регулятор многодвигательного электропривода; АРМ — периферийный модуль управления силовой частью преобразователя; РВ — блок питания с цифровыми регуляторами; EnG — двигатель непосредственного привода с высокочувствительными датчиками
Использование в системах электроприводов высокоточных датчиков скорости и углов поворота и системы компьютерного управления машиной в целом обеспечивает:
- синхронизацию скорости вращения и угла поворота печатных цилиндров всех секций с более высокой точностью, чем даже при прецизионных механических передачах;
- полную синхронизацию работы всех исполнительных механизмов машины в переходных процессах;
- возможность осуществления продольной приводки в процессе печати.
Подобное решение исключает механическую взаимосвязь отдельных узлов машины, появление резонансных колебаний и других отрицательных явлений, что существенно упрощает кинематическую схему машины, уменьшает общую массу, что, в свою очередь, снижает динамические нагрузки приводов.
Кроме того, необходимо отметить, что использование многодвигательного электропривода переменного тока снижает расходы на эксплуатацию машин (за счет исключения эксплуатационных расходов механических передач, редукторов и т.д.), повышается КПД привода и точность приводки при многокрасочной печати, при рубке и фальцовке.
В настоящее время все ведущие мировые фирмы, выпускающие полиграфическое оборудование, переходят на электропривод переменного тока по системе «ПЧ — АД к.з.р.». Варианты технических решений зависят от требований, предъявляемых к электроприводу каждой технологической машиной. Многодвигательный электропривод в рулонных печатных машинах применяют такие ведущие мировые фирмы, как «Вифаг», АВВ (Швейцария), КВА, «МАН-Роланд», «МАН-Пламаг», ГОСС и др.
Литература:
1. Бесстрашнов В.К. Электрооборудование полиграфических предприятий. М.: Искусство, 1956. 268 с.: ил.
2. Волощак И.А., Ефроймович Ю.Е., Ройзен С.С. Электооборудование полиграфических машин. М.: Книга, 1983. 296 с.
3. Розейн С.С., Артыков Э.С. Электрооборудование полиграфических машин. М.: МГАП «Мир книги», 1994. 368 с.
4. Офсетные печатные машины фирмы «Гейдельберг»: Учеб. пособие/ В.И. Штоляков, Э.С. Артыков, С.П. Вартанян и др./ М.: МГУП, 1999. 216 с.
5. Артыков Э.С. Электрооборудование полиграфических машин. М.: МГУП, 2005. 399 с.